曲がれないリニア
更新:2019/09/21、訂正 2019/10/17
超電導リニアの「超」はスペック至上主義者にはシビレル接頭語だと思うのですが、しかし、「常」電導のトランスラピッド(上海のリニア)と「超」電導リニアの性能を比べると:
| 超電導リニア | トランスラピッド | ||
|---|---|---|---|
 |  | ||
| 最高速度 | 505km/h | 500km/h | |
| カーブ最少半径 (高速時) | 8000m (400㎞/h) | 6200m (500km/h) 4000m (400km/h) 2250m (300km/h) 1000m (200km/h) | |
| カーブ最少半径 (低速時) | 900m (車輪走行) | 400m (浮上走行) | |
| 登坂力 * | 40パーミル | 100パーミル | |
| 消費電力(300km/h) | 54 Wh/座席・km | 34 Wh/座席・km | |
| 乗客の乗降り | ボーディングブリッジ式の乗降装置 | 通常の鉄道と同じプラットホーム | |
| 低速用補助車輪 | 必要 | 不要 | |
| 超電導磁石の冷凍機 | 必要 | 不要 | |
| ヘリウム | 必要 | 不要 | |
| 磁気シールド | 必要 | 不要 | |
| 乗車定員(最大) | 1000名 | 1400名 | |
| 浮上量と左右の隙間(**) | 浮上量 10㎝ ⇒ 車両の重量で変化 左右の隙間 約7.5㎝ ⇒ カーブの遠心力、横風などで変化 | 1㎝ ± 1~2㎜ ギャップ長を検出してほぼ一定に制御 | |
| 緊急時装置 | ステンレス製の車輪(註) (ブレーキ無) | スキッド(そり) | |
| クエンチ対策 | 必要だが不完全 | 不要 | |
| 営業開始 | 未定 | 2004年1月 |
{kind=link}
* 「Xパーミル」は 1000 m 進んで高さが X m 高くなる勾配
トランスラピッドの最少カーブ半径、登坂力は『世界のリニアモーターカー 西独トランスラピッドMaglev』(1989年)による。超電導リニアの最少カーブ半径(高速時)は『ここまで来た!超電導リニアモーターカー』(鉄道総合技術研究所編集、2006年)。消費電力は、超電導リニアは阿部修治『エネルギー問題としてのリニア新幹線』、トランスラピッドは、トランスラピッドインターナショナルのHPの " Environment" にあった最初のグラフによる。
{kind=link}
** 2019/10/15 訂正
乗り物としてみれば、シンプルな仕組みで、時速500㎞/h、最小回転半径400mを実現したトランスラピッドの方がどう考えても「上」だと思います。
これから本格化する南アルプストンネルの工事。上越新幹線の中山トンネルでは湧水が多く不良な地質を、新幹線のカーブの基準(半径4000m)より急なカーブ(半径1500m)で回避しました(参考:国立国会図書館、『レファレンス』、No.813、2018年10月20日、"リニア新幹線の整備促進の課題―トンネル工事が抱える開業遅延リスク―")。その結果、本来は260㎞/hで走りたかったこの部分は時速160㎞/hに減速して走っているそうです。
静岡県の大井川の減水問題でJR東海の事前の地質調査が不十分なことが明らかになりつつあります。中山トンネルもルートを決める前の事前の地質調査が不十分でした。ほぼ直線しか走れない超電導リニアでは中山トンネルのようにはいきません。最悪の場合、車輪走行で走らざるを得ない急なカーブ(たとえば半径900m)にすることだってありうるわけです。はたして、リニア中央新幹線は完成できるでしょうか。
静岡県知事はルートの変更にまで言及しています:
「もともと松本の方を回ると言っていたではないか。そういう話だったでしょ。ルートは変えられる」静岡テレビ、9月12日
JR東海が提示した、Aルート(木曽谷経由)、Bルート(伊那谷経由)、超電導リニアのカーブを曲がる性能からいってどちらも無理なはず。A、B ともに諏訪湖付近で半径8㎞程度の十数キロ続くカーブを曲がらなければならない。こんなカーブでクエンチが起きたら大変です。Bでは飯田市付近でもっときついカーブで曲がらないといけません。下手をすると車輪走行になる。だから、はじめから、Cルート(南アルプスルート)しかなかった。しかし、上越新幹線の中山トンネルの例に習えば、南アルプスルートの選択だって大バクチなのです。元凶は超電導リニアのカーブの走行性能の低さ(無さ)にある。JR東海も国交省も伊那谷の政治家も長野県知事も、静岡県が頑張っているうちに頭を冷やすべきです。
数字を並べた表だけでは納得できない人のために:
超電導リニアのテストコース、実験線
鉄道総合技術研究所(東京都 国分寺市)のリニアのテストコース跡
黄色で囲んだ中、赤矢印の灰色の直線。全長480m。
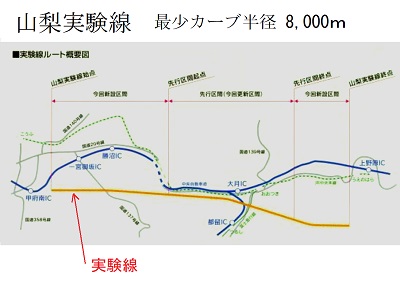
宮崎実験線と山梨実験線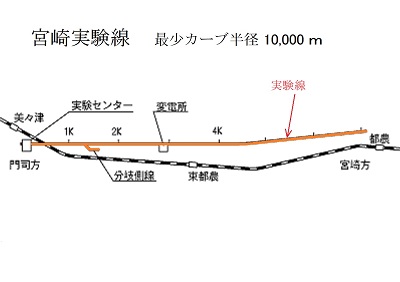
ドイツの実験線
ミュンヘンのS字コースを走るトランスラピッド2型、4型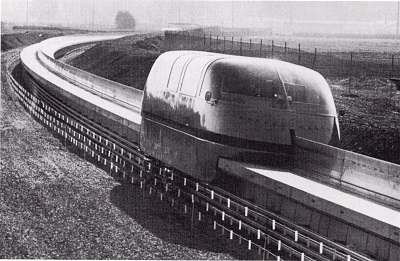

エムスランドの実験線(右が北)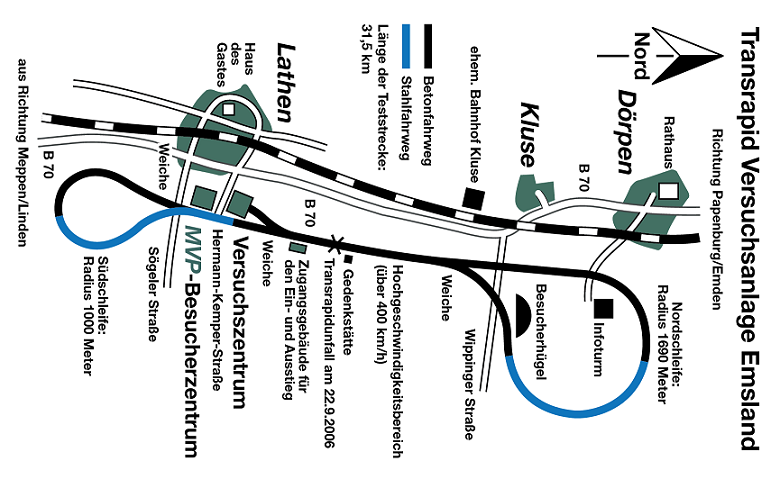
全長31.5kmの周回コース。北のループの半径は約1.7km、南は1㎞。
シーメンス社の超電導方式の半径140mのテストコースと試験車両

上海の営業路線。全長約30㎞。数字は赤矢印のカーブの半径。
この路線で、試運転期間中の2003年11月20日に501km/hで走っています。
ドイツは常電導方式でも超電導方式でも、カーブは当然曲がれなければならないとして開発してきたことがわかります。しかし、日本のリニアは、ほとんどカーブを走ることを考えてきていません。高速で最短距離を走れば、それでいいじゃないかと。
「浮上量と左右の隙間」、10cm浮上の意味
超伝導磁石は非常に強力な永久磁石とみなせます。超電導リニアの誘導反発方式では、浮上案内コイルに発生する磁力は、超電導磁石の動きを妨げる向きと力になります。つまり、どちらも永久磁石と同じとみなせます。
磁石同士の反発力も吸引力も、磁石同士の間の距離で変化します。加える力によって伸縮みするバネに似ています。「はかり」はバネの伸び縮みを利用しています。キッチンスケールに物をのせると針は物の目方を示します。つまり内部のバネの長さが変化しています。これと同じように、超電導リニアはカーブでは、カーブの設計速度より速いと遠心力で外側に車体がずれます。遅い時には逆に内側にずれます。乗客数が増えるとその分浮上量は減ります。よって、浮上量や左右の間隔を10㎝程度にしておかないと車体がガイドウェイに接触してしまいます。最大で4㎝ずれることを予想して設計されているようです(浮上量と隙間は10㎝あっても、4㎝ずれると非常用のストッパー車輪がガイドウェイに接触します。ストッパー車輪は車体から6㎝とび出していることになります。)。
訂正 2019/10/17 :上の段落で「浮上量や左右の間隔を10㎝程度にしておかないと車体がガイドウェイに接触してしまいます…ストッパー車輪は車体から6㎝とび出している」と書いています。「リニア鉄道館」に展示されている実験車両(MLX01-1)で測ると、ストッパー車輪の飛び出しは 3.5cmでした。ガイドウェイと横方向の隙間は、約8~8.5cm、「山梨リニア見学センター」では7㎝でした。したがって、ずれ幅の限度の 4㎝ に 3.5cm を加えた 7.5cmと推測できます。浮上量はJR東海さんの言う通りなら10㎝なのでしょうが、確認はしていません。
常電導方式は電磁石を使っています。電磁石は鉄の芯に電線を巻いたものですが、流す電流を変化させると磁力が変化します。ガイドウェイとの隙間の大きさはセンサーで検出できます。隙間の変化をセンサーで検出して、電磁石に流す電流をコントロールすることで隙間の大きさをほぼ一定(10㎜±1~2㎜)に保ちます。
訂正
2025/10/02 訂正:アルミ製ではなくステンレス製です。