更新:2018/12/28
プラレールでリニアを考える(その3)
浮上量は小さいほうが良い
プラレールを製造販売している「タカラトミー」は「リニアライナー」という、磁石の反発力で浮かび、リニアモーターで走る超電導リニアのおもちゃも作っています。その開発の様子が「タカラトミー」の「リニアライナー」の「開発日記」にあります。おもしろいエピソードが紹介されています。本物の磁気浮上式鉄道の技術を理解する上で興味深いです。
第3話 リニアが浮いた!
この回では、電気を流すコイルを車体に付けるのか、レール側(ガイドウェイ側)に付けるのかという問題です。(WayBackMachne)
レールにコイルを入れるとなると、レールが広がれば広がるほどコイルの数が必要になりコストも膨れ上がる。また、レイアウトの拡張を想定した場合、自由につなげたレールのそれぞれの位置で電流のON/OFFを行うことは、車両内1か所ないし2か所で切り替えを行うよりも複雑なシステムになる
ので、コイルは車体にいれることに決まりました。この方式は、名古屋のリニモがそうです。ほかに、北京、長沙、仁川にも営業路線があります。全部が常電導方式。本物の超電導リニアやトランスラピッド(上海リニア)はレール側(ガイドウェイ側)に電気を流すコイルがあります。
自由につなげたレールで走らせるには配線やシステムが複雑になるといっています。複雑なシステムになればコストや販売価格が高くなってしまいます。
第5話 試作を作ろう (WayBackMachne)
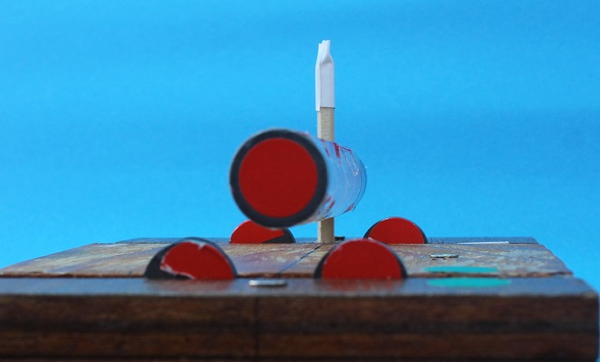
二つの磁石の例えばN極同士を向かい合わせにしても、もう一方の磁石を浮かせることはできません。
手をはなすと、くるっと回ってくっついてしまいます
二つ以上の磁石を組み合わせても、なかなか難しいです。
≪動画≫
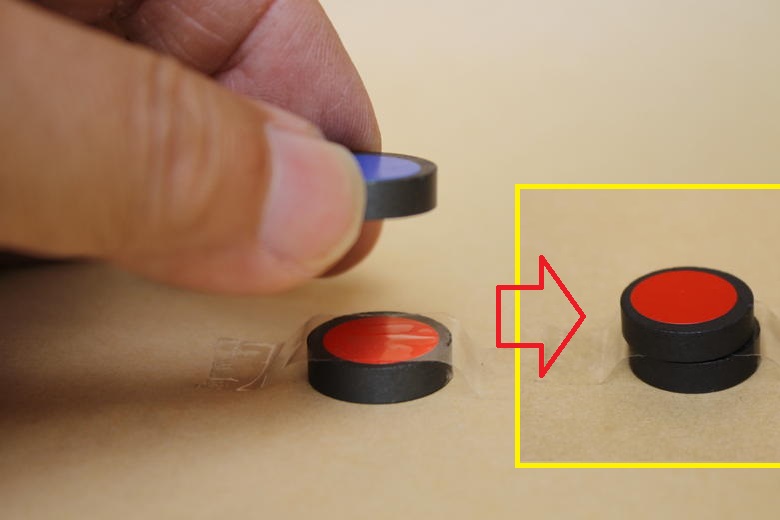
リニアライナーの開発者たちは、浮かすのに磁石を下の図のAのように組み合わせています(第3話 リニアが浮いた!)。
たぶん、Bのようなことだって考えたのだろうと思うのですが、リニアライナーの開発者たちは、磁石の位置関係が「ずれる」のを防ぐのに、結局、両側のカベを頼りに車輪で車体の位置を決めることにしました。磁石の反発力を利用して安定的に浮かせるのは実はかなり難しいことなのです。
関連ページ
第8話 Road to DREAM (WayBackMachine)
リニアモーターカーは浮いて走るもの、浮いている高さは高ければ高い方がいい。
そんな風に考えていたNとS(開発者のイニシャル)は浮上の高さには強くこだわり、様々な条件を試す中で浮上の高さは一定に保っていた。むしろここを変えるという事はスッポリ頭から抜けていた。
第6話 ラン リニア ラン(WayBackMachine)と、第7話 いざ、富山!(WayBackMachine)は、浮いて走ったけれどスピードがなかなか出ないという話です。その解決策が第8話。浮かす量を減らしたら速くなったのに偶然に気が付いたそうです。浮上量が大きいほど磁石の作用する力が弱くなるのですから当たり前のような話なのですが・・・
1992年8月の『日経サイエンス』の記事「アメリカのリニア」に、こんなことが書いてあります。
トランスラピッド方式では列車とガイドウエー間のギャップを1cmに維持するしかない。・・・高速で安全に走行するには、・・・調整頻度が増えて保守費用がかさむだろう。
このドイツ式による問題の対策として、・・・(90年代当時、米国の)リニア調査会のほかの開発チームにとっても、車両とガイドウエー間のギャップをいかにして大きくするかが、開発目標になっている。
しかしトランスラピッド側は
「良好な乗り心地を得るためには、車両とガイドウエー間のギャップを小さくする必要かある。グラマンもそのほかの開発チームも、我々のようにそのことを発見するだろう」と反論している。
「トランスラピッドの方式は正しい。これ以外の方式は欧州では10~20年前に放棄された方式だ」と国際トランスラピッド社長のワッカ一ズは主張している。
理由はこちらは乗り心地の問題とか、高速での安定性というのか安全性に関することなのですが、浮かす量は少ない方が良いということで、結論は同じです。つまり、安定性と高効率を目指すなら常電導が最適なのです。
浮かす量を大きくしないと不安というのは受け入れやすい説明だと思います。たぶんそこが盲点だと思います。
すこし話がずれるように思われるかも知れませんが・・・。
自動車のサスペンションや従来の鉄道のサスペンションは、乗り心地を良くするだけのものではありません。車輪を道路面やレールに常に接触させて安定して安全に走れるようにする役割もあります(参考)。常電導では電磁石と台車の間にサスペンションがあります。だから、8㎜とか1㎝の隙間でも安定して安全に走行できると思います。
超電導リニアは、反発力を利用して浮かせています。超電導磁石は電流をコントロールできません。車体の重さとかカーブでの遠心力に対しては、つり合いがとれる位置まで車体が沈んだり、ずれたりします。バネの作用と同じです。自動車や鉄道のサスペンションは、バネとダンパー(振動減衰装置)からできています。車輪と路面は接触しています。つまり地面との間をバネとダンパーでつないでいます。超電導リニアでは、地面とのあいだにバネがあってもダンパーがありません。だから乗り心地を改善するために最も有効な手段が使えないのです。
ダンパーがないので振動を抑えるのが難しいのですから、高速走行では安全性でも問題があるといえます。高速走行で問題になる蛇行動(ハンチングオシレーション)は浮上式にすることで解決できると思われていたのです。超電導リニアでは、実は、この点にも大きな問題があるのではないかと思います。
常電導では、ガイドウェイと電磁石の間の距離(すきま)が、常に一定になるように距離センサーと電子回路でコントロールしています。ガイドウェイと電磁石の移動する線は平行と考えられるので、地面に接触しているのと同じと見なせます。ダンパーで振動を弱めることができるので、高速では、常電導方式のほうが安全性では優れていると思います。
乗り心地についてですが、この点は、冷泉彰彦さんも『鉄道ジャーナル』(2018年4月号)で指摘していますよ(参考)。
10㎜の隙間でも安全に安定して走行できるという話は、HSSTの開発に携わった中村信二さんが書かれた「HSSTの開発について」に書いてあります。